1). DS18B20 Digital temperature

2) DHT11 Humidity Sensor

3) ESP8266 development board

4) Bread board ( 2 unit attached together)
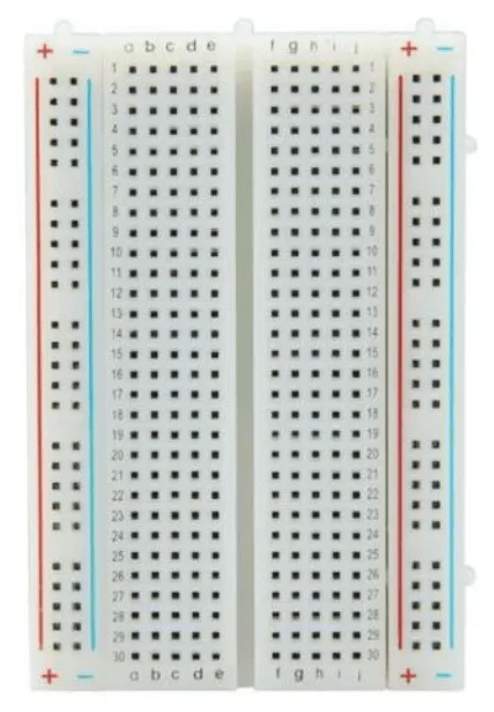
The reason why i am using 2 bread board attached together because the width of my ESP8266 simply doesn’t fit to be placed normally in the middle of the bread board. So bascially i have to attach 2 bread board and place my ESP8266 in the middle of the joining part.
5) Cable connectors (8 pieces)
6) USB 2 to USB Mini cable

from machine import Pin
import machine
import time
import dht
class Humidity:
def __init__(self, pin):
self.pin = machine.Pin(pin)
self.sensor = dht.DHT11(self.pin)
def read(self):
self.sensor.measure()
return self.sensor.humidity()temperature.py
from machine import Pin
import machine
import utime
import onewire, ds18x20, time
class Temperature:
def __init__(self, pin):
self.loop = 1
self.pin = machine.Pin(pin)
self.sensor = ds18x20.DS18X20(onewire.OneWire(self.pin))
self.roms = self.sensor.scan()
def read(self):
self.sensor.convert_temp()
time.sleep_ms(250)
return self.sensor.read_temp(self.roms[0])
ds18x20.py
# DS18x20 temperature sensor driver for MicroPython.
# MIT license; Copyright (c) 2016 Damien P. George
from micropython import const
_CONVERT = const(0x44)
_RD_SCRATCH = const(0xBE)
_WR_SCRATCH = const(0x4E)
class DS18X20:
def __init__(self, onewire):
self.ow = onewire
self.buf = bytearray(9)
def scan(self):
return [rom for rom in self.ow.scan() if rom[0] in (0x10, 0x22, 0x28)]
def convert_temp(self):
self.ow.reset(True)
self.ow.writebyte(self.ow.SKIP_ROM)
self.ow.writebyte(_CONVERT)
def read_scratch(self, rom):
self.ow.reset(True)
self.ow.select_rom(rom)
self.ow.writebyte(_RD_SCRATCH)
self.ow.readinto(self.buf)
if self.ow.crc8(self.buf):
raise Exception("CRC error")
return self.buf
def write_scratch(self, rom, buf):
self.ow.reset(True)
self.ow.select_rom(rom)
self.ow.writebyte(_WR_SCRATCH)
self.ow.write(buf)
def read_temp(self, rom):
buf = self.read_scratch(rom)
if rom[0] == 0x10:
if buf[1]:
t = buf[0] >> 1 | 0x80
t = -((~t + 1) & 0xFF)
else:
t = buf[0] >> 1
return t - 0.25 + (buf[7] - buf[6]) / buf[7]
else:
t = buf[1] << 8 | buf[0]
if t & 0x8000: # sign bit set
t = -((t ^ 0xFFFF) + 1)
return t / 16
onewire.py
# 1-Wire driver for MicroPython
# MIT license; Copyright (c) 2016 Damien P. George
import _onewire as _ow
class OneWireError(Exception):
pass
class OneWire:
SEARCH_ROM = 0xF0
MATCH_ROM = 0x55
SKIP_ROM = 0xCC
def __init__(self, pin):
self.pin = pin
self.pin.init(pin.OPEN_DRAIN, pin.PULL_UP)
def reset(self, required=False):
reset = _ow.reset(self.pin)
if required and not reset:
raise OneWireError
return reset
def readbit(self):
return _ow.readbit(self.pin)
def readbyte(self):
return _ow.readbyte(self.pin)
def readinto(self, buf):
for i in range(len(buf)):
buf[i] = _ow.readbyte(self.pin)
def writebit(self, value):
return _ow.writebit(self.pin, value)
def writebyte(self, value):
return _ow.writebyte(self.pin, value)
def write(self, buf):
for b in buf:
_ow.writebyte(self.pin, b)
def select_rom(self, rom):
self.reset()
self.writebyte(self.MATCH_ROM)
self.write(rom)
def scan(self):
devices = []
diff = 65
rom = False
for i in range(0xFF):
rom, diff = self._search_rom(rom, diff)
if rom:
devices += [rom]
if diff == 0:
break
return devices
def _search_rom(self, l_rom, diff):
if not self.reset():
return None, 0
self.writebyte(self.SEARCH_ROM)
if not l_rom:
l_rom = bytearray(8)
rom = bytearray(8)
next_diff = 0
i = 64
for byte in range(8):
r_b = 0
for bit in range(8):
b = self.readbit()
if self.readbit():
if b: # there are no devices or there is an error on the bus
return None, 0
else:
if not b: # collision, two devices with different bit meaning
if diff > i or ((l_rom[byte] & (1 << bit)) and diff != i):
b = 1
next_diff = i
self.writebit(b)
if b:
r_b |= 1 << bit
i -= 1
rom[byte] = r_b
return rom, next_diff
def crc8(self, data):
return _ow.crc8(data)
utility.py
import network
import ubinascii
class Utils:
@staticmethod
def macaddress():
return ubinascii.hexlify(network.WLAN().config('mac'),':').decode()
@staticmethod
def connectWIFI(WIFI_SSID,WIFI_PASSWORD):
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect(WIFI_SSID,WIFI_PASSWORD)
while not wlan.isconnected():
pass
@staticmethod
def doubleDigit(val):
if(val < 10):
out = "0" + str(val)
else:
out = str(val)
return out
main.py
import time, temperature, humidity
temperature = temperature.Temperature(14)
humidity = humidity.Humidity(16)
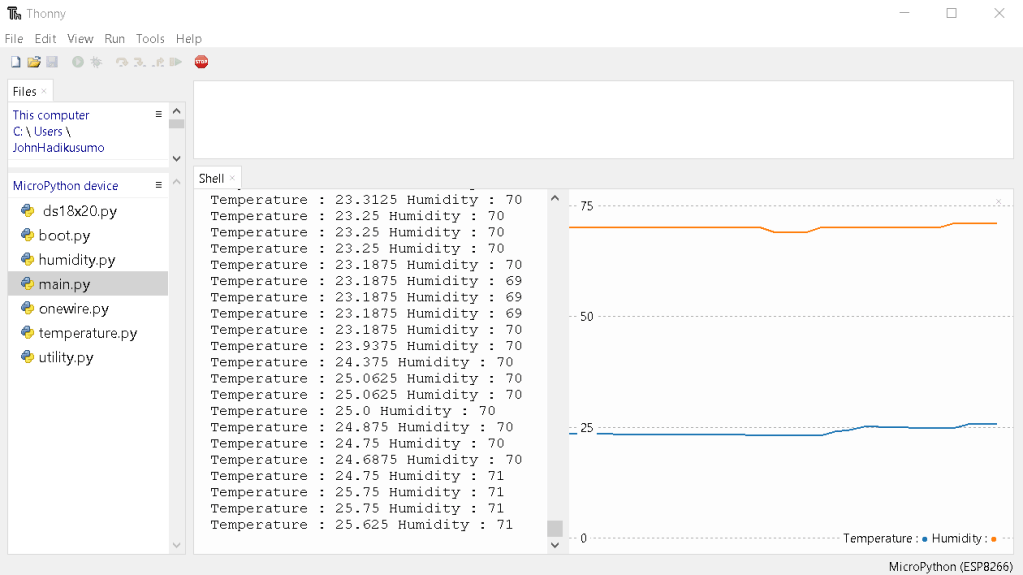
while True:
print("Temperature : " + str(temperature.read()) + " Humidity : " + str(humidity.read()))
time.sleep_ms(500)